

Moteur Pas à Pas en Alternateur (PAP)
Moteur Pas à Pas en Alternateur (PAP)
1 Principe de ce moteur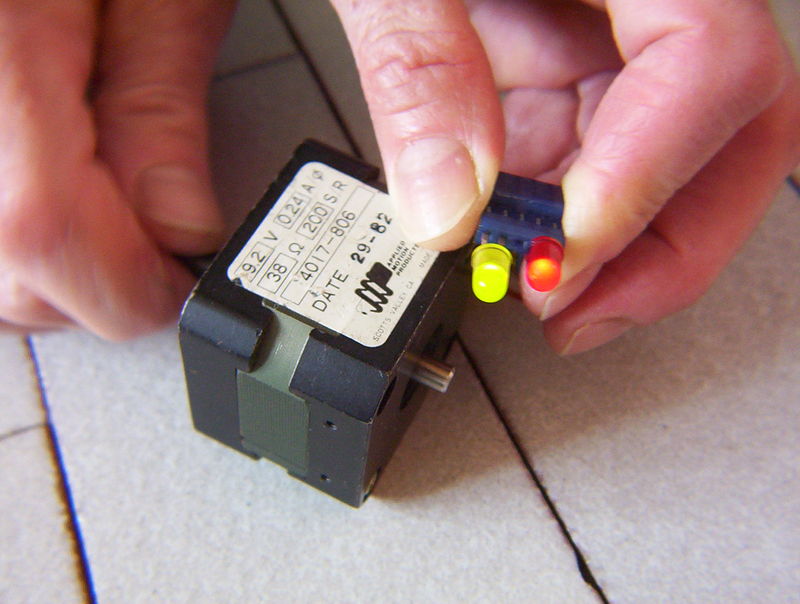
1.1 Le nombre de pas
1.2 Le nombre de phases
1.3 Un moteur très répandu
2 Moteur en Alternateur
2.1 Problème d'origine
2.2 Puissance
2.3 Le moteur pas à pas en alternateur
2.4 Quelques montages de faible puissance
2.5 Autre moteur PAP
3 Avantages et inconvénients
4 Conclusions
Si vous arrivez directement sur cette page par un moteur de recherche, vous pouvez avoir accès à la table des matières et à chaque article, en page d'accueil. L'accès se fait par l'un des deux liens en tête de colonne de droite ----->
Préambule
Cette série de mesures est avant tout la conséquence d'un essai de petites éoliennes de Type SAVONIUS. Il était en effet nécessaire de quantifier un peu mieux le peu de puissance obtenu tant au niveau mécanique (hors de cet article) qu'au niveau électrique.
Plusieurs moteurs pas à pas (PAP) ont été essayés et les résultats jugés alors assez décevants.
Cet article va faire un peu la part des choses et expliquer ce qui peut l'être. Cette partie électrotechnique n'est pas réellement ma spécialité mais je suis obligé de m'y plonger tout de même un petit peu par nécessité ! Je n'aurai donc pas réponse à tout !
Pour commencer les explications, voici la forme de la tension aux bornes d'une des deux LED de la photo de tête d'article (lorsque le moteur est entraîné à vitesse constante...et non pas à la main !)
1 Principe de ce moteur
Les grands principes de la physique subsistent. Un aimant ou un électroaimant et des bobinages…Contrairement aux autres moteurs, le moteur Pas à Pas (PAP) est conçu pour effectuer des rotations suivant des angles précis, (et le plus souvent en moins de 360°). Il ne peut pas atteindre de grandes vitesses de rotation.
L'ensemble est parfaitement expliqué dans Wikipédia à l'URL indiquée ci-après et il n'est pas utile de reproduire ce qui est clair et précis http://fr.wikipedia.orgfr.wikipedia.org/wiki/Moteur_pas_%C3%A0_pas.
Ce qui nous intéresse particulièrement, ce sont les appareils qui consomment le moins d'énergie possible, et donc ceux à aimant permanent (et non à réluctance variable).
Le problème des machines à excitation est qu'il faut à un moment ou un autre amorcer ces circuits, que cela peut poser quelques problèmes, et que cette énergie est perdue.
Vous pourrez également consulter l'article consacré aux essais de petites éoliennes (sur bricolsec) .
Cet article était à l'origine l'application complète, et le sujet étant intéressant, il m'a paru nécessaire de séparer "le vent" et "le générateur".
1.1 Le nombre de pas
C'est une des caractéristiques essentielles de ces moteurs. On trouve couramment des moteurs à 200 pas par tour, ce sera le cas du petit moteur de l'exemple. Du nombres de pas, vont dépendre les puissances possibles.
Sur la photo de la vue interne de l'ensemble de 200 pas "écorché", on distingue parfaitement que la surface de deux pôles (dents ou bossages) consacrée à un pas est extrêmement faible et donc que le flux magnétique le sera aussi. Pour avoir compté le nombre de bossages du rotor, il n'y en a pas 200 mais seulement 50. (On retrouvera ce chiffre !)
Dès cet instant, il est possible de tirer une première conclusion qui est de dire que la puissance de ces moteurs ne figurera pas au palmarès des qualités.
de tirer une première conclusion qui est de dire que la puissance de ces moteurs ne figurera pas au palmarès des qualités.
On peut même extrapoler en disant que le nombre de pas sera directement en relation inverse avec la puissance, puisque les surfaces d'échanges de flux magnétique influencent directement la puissance, mais ce n'est pas rigoureusement exact, car ce serait plutôt la surface des dents ce qui n'est pas tout à fait identique.
Que dire d'un moteur pas à pas à un seul pas ? (Ou à pas infini ?). C'est quasiment un alternateur ! Le § 2 est donc fort à propos. Mis à part les dents et la technologie des bobinages, rien ne diffère beaucoup d'un petit alternateur.
Vous avez pu lire dans Wikipédia la notion des demi-pas... Dans notre cas nous ne nous y intéresserons pas, puisque c'est uniquement dans l'optique moteur. Cette possibilité autorise des positionnements 2 fois plus fins. Cela évite des usinages très précis et coûteux, et c'est uniquement la commande électronique qui permet cela.
Pour le nombre de pas, encore une indication...Le rotor est fendu sur sa circonférence par une gorge au milieu. Remarquer que chaque dent est alors opposée sur chaque roue dentée. On comprend que l'action d'un flux n'est plus sur la longueur complète du rotor mais seulement sur un peu moins de la moitié (longueur de gorge en moins !) Cette gorge est certainement nécessaire au dégagement des outils ou au procédé de fabrication du rotor, mais sert aussi à éviter les effets de bord au niveau du flux magnétique !
1.2 Le nombre de phases
Suivant le nombre de pas et les puissances demandées, tant en "résistance à la rotation" qu'en positionnement, il y a des moteurs à 2 ou 3 phases. Je ne suis pas spécialiste en électrotechnique, mais certainement que cela doit ressembler aux alternateurs de puissance,  et que l'énergie est mieux utilisée avec 3 phases qu'avec 2. (C'est à voir avec les spécialistes !) (Le moteur décrit en § 2.5 me pose un problème de compréhension avec 3 phases et 8 bobinages !!!)
et que l'énergie est mieux utilisée avec 3 phases qu'avec 2. (C'est à voir avec les spécialistes !) (Le moteur décrit en § 2.5 me pose un problème de compréhension avec 3 phases et 8 bobinages !!!)
Dans notre exemple, nous ne travaillerons qu'avec ce petit moteur de 200 pas/tour et à 2 phases (moteur PAP de disquette). Originellement il est alimenté en 12V.
A noter que le maintien en position, même avec un aimant permanent n'est pas très "solide", et qu'un courant permanent continu dans une phase est souvent nécessaire. Ceci entraînera donc une dissipation thermique non négligeable, non contrecarrée par une force contre-électromotrice, puisque le dispositif est immobile.
Ces calories devront être évacuées. Chaque phase a une résistance (statique) de 38 ohms. L'impédance (dynamique) sera différente et de l'ordre d'une centaine ohms.
Un dernier point, vous aurez remarqué la présence d'un stator en tôles empilées, destinées non pas au fonctionnement statique, puisque le moteur au repos est un simple récepteur en courant continu, mais bien en dynamique, où il est le siège de pertes par courant de Foucault. Donc celui-ci est normalement feuilleté.
1.3 Un moteur très répandu
Ce moteur est très répandu en micro-informatique, puisqu'il équipait les lecteurs de disquettes des années "1900" et quelques disques tout aussi vieux dans la fonction de positionnement des têtes ! Ces moteurs sont souvent des moteurs de 200 pas.
Dans les photocopieurs, ces moteurs sont également présents et plus habituellement calibrés en degrés angulaires par pas (2° dans l'exemple que j'ai, soit 180 pas par tour).
Ces moteurs sont également très utilisés en automatismes notamment pou r des positionnements angulaires de 30°, 45°, 90°, car, par construction, la précision est présente en permanence. Il peut aussi s'agir de petites machines spéciales en positionnement angulaire ou retournement de pièces.
r des positionnements angulaires de 30°, 45°, 90°, car, par construction, la précision est présente en permanence. Il peut aussi s'agir de petites machines spéciales en positionnement angulaire ou retournement de pièces.
Lorsqu'un couple élevé est nécessaire, ces PAP ne peuvent pas assurer le travail et des moteurs traditionnels ou "brushless" asservis sont alors utilisés.
2 Moteur en Alternateur
Ce paragraphe est bien le thème principal de cet article pour lequel je n'ai pas vu d'autres articles de fond sur le sujet, mais seulement quelques bribes en forum.
Je ne pense pas, du moins à ce jour, être trop en retard sur ce sujet, qui présente (uniquement pour le particulier) un certain intérêt.
Cet intérêt pour les moteurs PAP permet de "ne pas croire au Père Noël" mais de calibrer ses souhaits à ce qui est réellement possible.
Entraîner ce moteur inverse sa fonction, il devient générateur et il produit alors du courant ! C'est un alternateur !
2.1 Problème d'origine
Le problème d'origine est de trouver un générateur intéressant pour transformer les énergies mécaniques présentes à nos côtés tous les jours (vent, petites chutes d'eau…).
Cela étant il faut dire que les alternateurs destinés à la production d'énergie ont été inventés pour cela, mais que leur prix est dissuasif, et que leur vitesse de rotation n'est pas compatible avec les petits moyens de rotation (inférieurs à 60 tr/mn).
De plus il leur faut de l'énergie (courant continu) pour alimenter le rotor, au moins pour l'amorçage. Dans le cadre d'une utilisation familiale écologique, cela n'est pas compatible !
L'alternateur de voiture qui aurait une bonne puissance est déjà un dispositif conséquent.
Il a l'avantage certain d'être produit en grande série et donc à un prix intéressant. Cependant il est calculé pour une vitesse minimum de 1500 tr/mn. Or cette vitesse de rotation ne peut être obtenue directement d'une éolienne ou d'une chute d'eau. Il y a donc nécessité d'un multiplicateur (occasionnant quelques pertes non négligeables).
La vitesse de rotation et le prix sont des obstacles majeurs au développement de petites applications.
2.2 Puissance
Cette notion est importante, car un alternateur de 1 KVA ne peut pas être raccordé à une éolienne fournissant au maximum 1 VA. Les choses doivent rester à peu près homogènes.
Ainsi un alternateur de voiture de petite cylindrée diesel peut donner 50 à 150 A sous 13.5 volts. (Pour 150 A et 13.5V cela fait tout de même 2 KW !) L'éolienne, ou la source d'énergie est déjà conséquente à cette puissance. Pour donner un ordre de grandeur, c'est un peu plus que la puissance d'une "mobylette"
Pour obtenir des performances en termes d'énergie, il n'y pas de miracle, il faut l'appareil dont la fonction est prévue pour !
2.3 Le moteur pas à pas en alternateur
Voici le dénouement de l'article !
Pas de grands laïus, tout moteur PAP possédant un aimant permanent est parfaitement utilisable en alternateur à des fins individuelles ou familiales.
Cependant, plus le nombre de pas sera élevé, plus la puissan ce pouvant être tirée sera faible (flux magnétique faible en regard des surfaces). Réciproquement plus il y aura un grand nombre de pas (je serais tenté de dire de pôles à la place de "pas"), plus la fréquence du courant alternatif sera élevée pour une même vitesse de rotation.
ce pouvant être tirée sera faible (flux magnétique faible en regard des surfaces). Réciproquement plus il y aura un grand nombre de pas (je serais tenté de dire de pôles à la place de "pas"), plus la fréquence du courant alternatif sera élevée pour une même vitesse de rotation.
Voici quelques essais réalisés sur un petit moteur PAP de 200 pas de lecteur de disquette.
Les mesures de vitesse ont été réalisées à la dynamo tachymétrique dont la constante est de 0.012V/tr/mn.
On constate que la plage de fonctionnement la plus adaptée au niveau vitesse minimum est entre 413 et 650 tr/mn, puisque la tension de sortie en charge est presque à son maximum.
(Remarquer à cette occasion que la tension en charge est voisine de la moitié de la tension à vide)
Sur la photo de l'oscillogramme, on peut vérifier la très bonne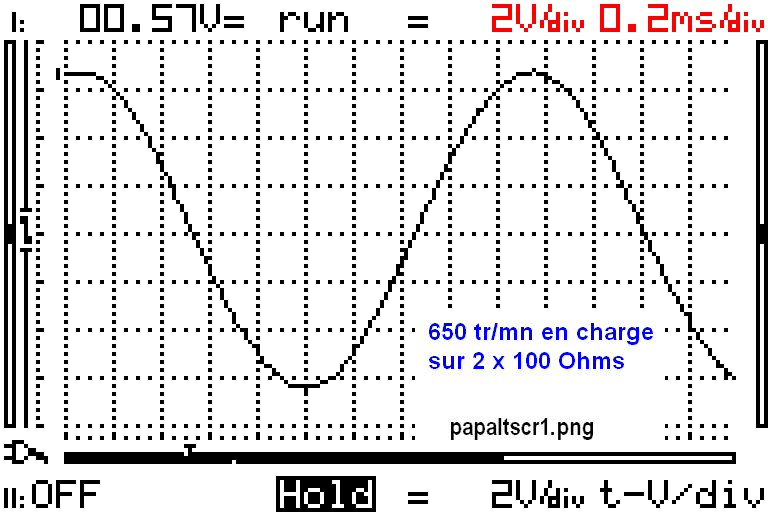 forme sinusoïdale de la tension (en charge à 650 tr/mn)
forme sinusoïdale de la tension (en charge à 650 tr/mn)
Je parle toujours de tension, alors qu'il y a deux ou trois phases. Il est évident que chaque phase va donner la même valeur.
A ce sujet une mesure faite à 413 tours/mn a donné sur la phase I, 9.06V pour la totalité du moteur à vide (sans aucune charge) et 8.94 V toujours sur la phase I, pour la phase II chargée.
Ceci indique une très bonne séparation des phases en termes d'interaction mutuelle.
|
|
Les différentes phases sont décalées d'un certain angle,  et la puissance totale tirée sera la somme des puissances sur chaque phase. (La photo de titre d'article montre clairement les deux LED branchées en direct et indépendamment sur chaque phase).
et la puissance totale tirée sera la somme des puissances sur chaque phase. (La photo de titre d'article montre clairement les deux LED branchées en direct et indépendamment sur chaque phase).
Le décalage angulaire mesuré fait 88° (et autant dire 90° aux erreurs de mesures près). (A supposer qu'il s'agisse de 8 pôles (bobines) et de 2 phases= 8/2=360/4=90° ce pourrait être une explication ???)
Cela pourrait s'appeler un générateur biphasé (ou diphasé). Vérification faite, en prenant un commun sur les deux enroulements (et en charge), la tension était de 4.68 entre phase et neutre et de 6.60V entre phase. Or 4.68*rac2=6.61 cqfd !
Pour revenir au sujet initial, il faut donc cumuler les puissances partielles sur chaque phase pour obtenir le maximum du générateur.
Ceci est possible, mais délicat, car les phases étant différentes, les bobinages ne peuvent pas être mis en parallèle sous peine de courts-circuits.
Une même puissance peut être tirée sur chaque phase ou regroupée par redressement en courant continu, pour obtenir un maximum de puissance.
Sur les tensions faibles, dues principalement aux faibles vitesses, le redressement double alternance n'est pas recommandé, car on perd une chute de tension complémentaire d'une deuxième diode à 0.7 V (pont).
Il est possible mettre des diodes Schottky avec 0.45 V de chute, type B2045 ou SB2045CT ou plus petit si vous trouvez car ces modèle font 20 A. (pour 40 mA !)
Notez que certaines diodes rapides sont groupées par deux dans un unique boîtier TO220 et constituent ainsi un seul composant, ce qui est le cas de la diode référencée ci-dessus.
Pour le filtrage de telles tensions, il est possible, de réduire le condensateur de filtrage à de faibles valeurs (voir doubleur), non seulement à cause de la fréquence, mais aussi à cause du courant fourni qui est auto limité par le moteur.
Il est également possible pour des fréquences élevées de diviser les masses des transformateurs éventuels, voire si très élevées d'utiliser des structures en ferrites…Mais da ns le cas de transformation, il faut penser au rendement, et s'assurer de disposer à l'origine d'une puissance suffisante…
ns le cas de transformation, il faut penser au rendement, et s'assurer de disposer à l'origine d'une puissance suffisante…
Notez également, du fait de la phase différente des deux enroulements une certaine inutilité de les mettre en série, car la tension de sortie est en général sinusoïdale, mais est la somme algébrique de deux sinusoïdes déphasés d'un angle "x", mais PAS deux fois la tension. (À condition d'identité des tensions nominales)
D'une façon générale la puissance maximale est obtenue lorsque la chute de tension est la moitié de la tension à vide. En d'autres termes lorsque la résistance (impédance) interne du générateur est égale à celle de l'utilisation. Ici, on peut voir que ce moteur ne pourra donner que 40 mA quelque soit la vitesse de rotation. En effet les valeurs indiquées sur le graphique correspondent à la moitié de la tension à vide. Ceci a cependant un intérêt qui est de dire que plus le PAP ira vite, plus la puissance sera importante (uniquement par le biais de la tension puisque le courant restera limité à 40 mA : P=UI).
Il y aura donc lieu pour les applications où c'est la puissance qui sera recherchée, de calculer exactement la moitié de la tension à vide pour obtenir cette puissance maximum.
Dans l'exemple à 1000 tr/mn, la puissance maxi sera obtenue pour 10.3 V environ soit 0.412 W ou 0.824 W pour les deux phases. L'impédance équivalente est alors de 100 Ohms environ.
Noter aussi que tous ces montages sont insensibles au sens de rotation.
Un dernier point qui mérite une certaine attention car je ne suis pas certain de ce que je vais avancer.
Les fréquences entre vitesses de rotation et ce qui est affiché à l'oscillo ne correspondent pas. Ainsi à 650 Tr/mn cela donne 10.83 tr/mn si je compte 200 pas cela donne une fréquence de 2166 HZ théorique (soit une période de 461 µs).
Or je mesure environ 9.5 div à 0.2 ms/div soit 1.8 ms ce qui correspond à une fréquence de 555 Hz ! C'est à dire pratiquement 4 fois moins.
Je pense avoir compris la raison, mais je ne suis pas sûr ! Si on compte les dents (bossages) du rotor, il y en a 50, et donc cela correspondrait !
Je ne peux cependant oublier de faire le lien avec le déphasage de 90°, ni oublier le décalage des dents ?
Donc si il y a des spécialistes en électrotechnique merci de donner quelques lumières sur ce sujet (Je publierai bien entendu)
2.4 Quelques montages de faible puissance
Alimentation de 2 LED ou plus directement en Alternatif, suiv ant la vitesse de rotation. Penser éventuellement à la tension inverse de ces LED à protéger par une diode Zener. Noter que l'avantage de l'alternatif et de pas avoir de chute de tension directe par une diode en cas d'alimentation en continu.
ant la vitesse de rotation. Penser éventuellement à la tension inverse de ces LED à protéger par une diode Zener. Noter que l'avantage de l'alternatif et de pas avoir de chute de tension directe par une diode en cas d'alimentation en continu.
A préférer un montage avec LED en séries parallèles et tête bêche pour utiliser chaque alternance d'une phase. Exemple à 413 tr/mn il sera possible de tirer le max de puissance en LED pour 4.35V soit 3 LED en +, 3 LED en – et cela sur chaque phase. Donc 12 LED peuvent ainsi être "drivées" (à cette vitesse). Je n'ai pas essayé, mais il ne me semble pas nécessaire de mettre de résistances de limitation, car l'ensemble devrait normalement s'auto-réguler.
|
|
Alimentation redressée double phase asymétrique, pour un courant plus important. Asymétrique à cause des angles de phase différents. (L'ondulation le sera également)
|
|
|
|
|
|
|
|
| |
|
Redressement d'une tension positive et d'une négative (alimentations d'amplificateurs opérationnels par exemple).
Si la masse est mise sur le moins, on a le schéma d'un doubleur traditionnel avec transfo à point milieu (voir ci dessous 2 ème possibilité).
|
|
|
|
|
|
|
|
|
Redressement en doubleur de tension.
Un autre schéma avec commun des bobinages et diode inférieure inversée est également possible. Voici ci-dessous la forme d'onde. C'est 40 V redressés . Sur 100 Ohms il n'y a plus que 4 volts à 650 tr/mn mais sans ondulation.
|
|
|
|
|
|
|
|
|
|
Chargeur de batterie solaire OU éolien.
|
|
|
|
|
|
|
|
|
|
|
|
Mesure de vitesse de rotation de précision par la fréquence, mais aussi mesure de la vitesse par la tension à vide (voir courbes). Ceci permet entre autres possibilités la mesure de la vitesse du vent. (Éolienne dédiée à la fonction d'anémomètre).
2.5 Autre moteur PAP
PAP
|
|
|
|
|
|
Il fallait tout de même montrer les caractéristiques d'un autre type de moteur, et celui-ci correspond au type "B" que vous verrez dans l'article sur les éoliennes.
On constate que le nombre de pôles est identique, que le nombre de dents sur chaque pôle est le même, mais que très certainement le nombre de dents du stator est différent (non vérifié). Cependant la structure générale est identique, et le stator est lui aussi divisé par une gorge et les dents sont opposées entre ces deux sections.
Voici la forme de la tension, qui, on le constatera, ressemble plus à des portions de cercle qu'à une véritable sinusoïde comme dans l'autre moteur 200 pas. Quant à la vue éclatée, elle est preque identique.
En ce qui concerne la tension fournie, celle-ci est supérieure pour une même vitesse de rotation, mais la fréquence est rigoureusement identique...!
3 Avantages et inconvénients
Moteurs à prix très abordable, faible poids, fréquence élevée autorisant une vitesse de rotation assez faible. Si fréquence très élevée, possibilité d'utiliser des transformateurs de faible poids en ferrite.
Tension de sortie Sinusoïdale disponible sur 2 ou 3 enroulements suivant les types.
Dans les inconvénients, il y a le manque évident de puissance disponible à cause d'un flux magnétique restreint directement fonction du nombre de pas par tour (pôles). Ce manque de puissance est aussi dû à une résistance interne élevée.
On distingue visuellement, également à faible vitesse les variations d'entrefer par un phénomène de diminution augmentation d'intensité lumineuse des LED. (Cela s'observe sur la répétitivité sur un tour de moteur).
Le problème de la nécessaire multiplication de la vitesse est toujours présent avec une intensité moindre qu'avec un générateur traditionnel, mais cela reste encore très limite, et sur ce sujet je n'ai pas de solution réellement adaptée hormis cette tête de meuleuse avec un rapport de l'ordre de 2.5 encore un peu faible.
Le couplage mécanique à ces puissances est réalisé avec un petit morceau de tuyau plastique "cristal" qui est assez solide et permet de compenser les désalignements éventuels. (Un petit collier nylon peut assurer le complément de serrage de ce accouplement élastique bon marché)
4 Conclusions
Ces petits moteurs PAP sont de remarquables PETITS générateurs de courant alternatif. Ils sont surtout orientés vers la pédagogie ou les petits montages électroniques. Ils peuvent accessoirement être utilisés en appareils de mesure de la vitesse du vent.
Ils peuvent être des petits compléments pour la recharge de petites batteries CdNi.
Ils peuvent allumer plusieurs LED de balisage (environ 4 ou 8 LED pour des vitesses de rotation de l'ordre de 1 tour par seconde) (comme les bornes solaires autonomes)
Ces moteurs PAP génèrent des tensions assez élevées relativement à la vitesse de rotation et c'est un avantage certain. La tension est présente mais le courant reste faible.
Ce sont des alternateurs un peu particuliers, mais oh combien meilleur marché !
Ils permettent d'obtenir plusieurs tensions séparées galvaniquement.
Il ne sera pas possible de façon simple d'utiliser le circuit intégré 6601D présent dans les bornes solaires de jardin, sans limiter la vitesse de rotation, car il ne faudrait pas dépasser 1.25 V pour en obtenir 3.5V, et vu la facilité des moteurs PAP d'obtenir des tensions élevées, cela reste sans objet.
(Il y a aussi maintenant les circuits PR4401 ou PR4402, de "PREMA semiconductor")
Pourquoi ne pas utiliser ces moteurs PAP avec de petites éolienne de fortune pour obtenir un tout petit éclairage à LED dans les pays sans électricité proche (si il y a un peu de vent). Ces moteur PAP sont souvent issus des "déchets" informatique, mais intrinsèquement les moteurs sont peu polluants, et la mise en oeuvre reste très simple, même à des personnes sans aucune formation.
Pour d'autres moteurs, le tracé des deux courbes (sur fond jaune) permet de situer le moteur et de choisir le point de fonctionnement le plus approprié.
"L'essentiel est d'avancer... pas à pas !"
______ ( retour début article ) ______
______ ( retour lokistagnepas ) ______
______ ( retour bricolsec ) ______
/https%3A%2F%2Fstorage.canalblog.com%2F76%2F70%2F336101%2F126295711_o.jpg)
/https%3A%2F%2Fstorage.canalblog.com%2F00%2F57%2F336101%2F122194457_o.jpg)
/https%3A%2F%2Fstorage.canalblog.com%2F12%2F28%2F336101%2F108886817_o.jpg)
/https%3A%2F%2Fstorage.canalblog.com%2F32%2F63%2F336101%2F108824913_o.jpg)
/https%3A%2F%2Fprofilepics.canalblog.com%2Fprofilepics%2F2%2F8%2F289215.jpg)